News
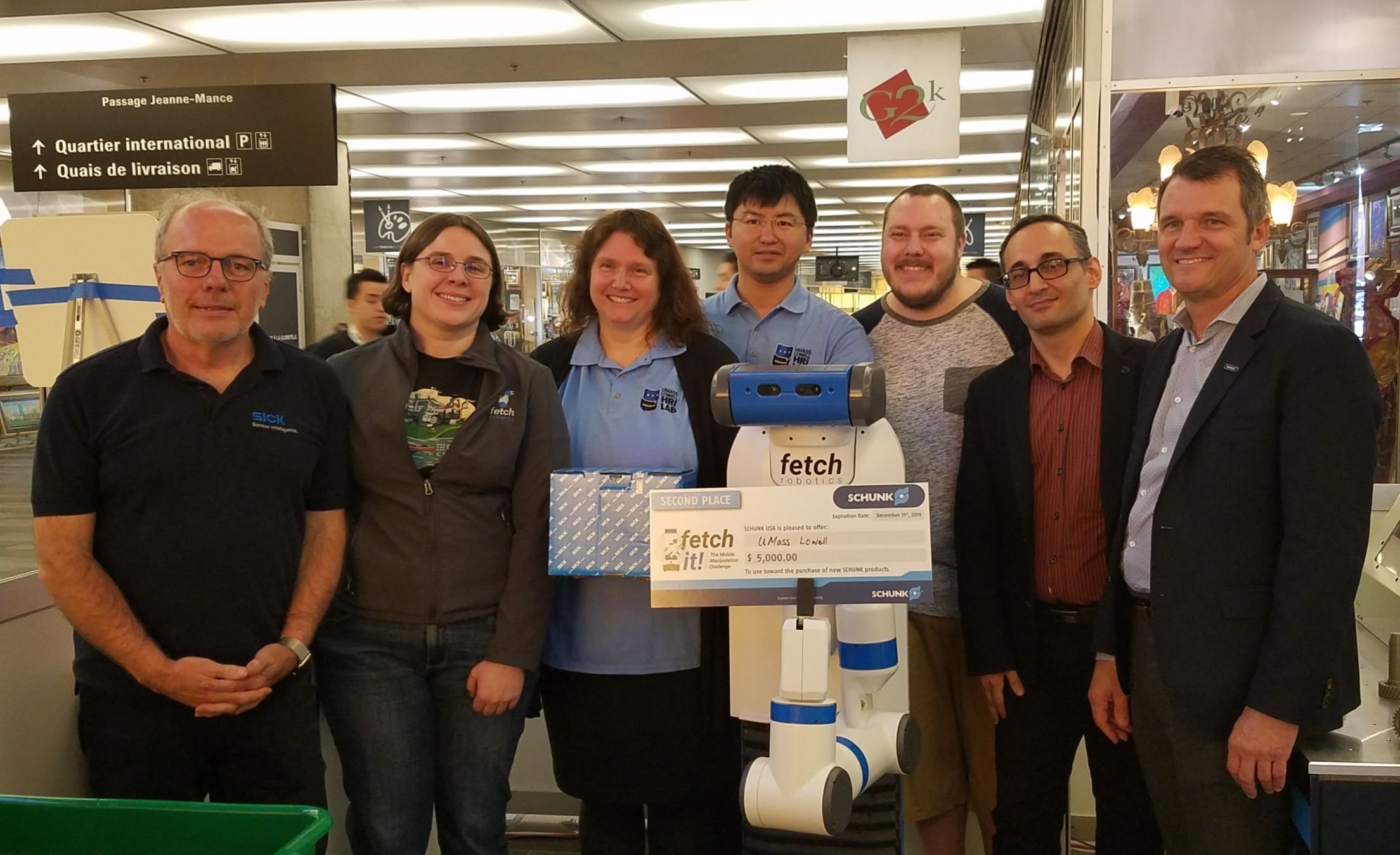
- May 22, 2019 - Our team, RoboHawks, got second place in FetchIt! Robotics Challenge
- Jan 26, 2019 - Our paper was accepted at ICRA 2019
- Dec 31, 2018 - Funded PhD positions in Robotics [Closed]
- Dec 30, 2018 - Multiple funded Research Assistantships [Apply][Apply]
- Nov 27, 2018 - Our journal paper on TLGC was accepted

Publications
Most recent publications
Research
Welcome to PeARL lab website! Our research focuses on developing machine learning algorithms and their application to robot autonomy and physical Human-Robot Interaction. Our group's research interests include Learning from Demonstration, Learning Reactive Behavior, and Reinforcement Learning.
-
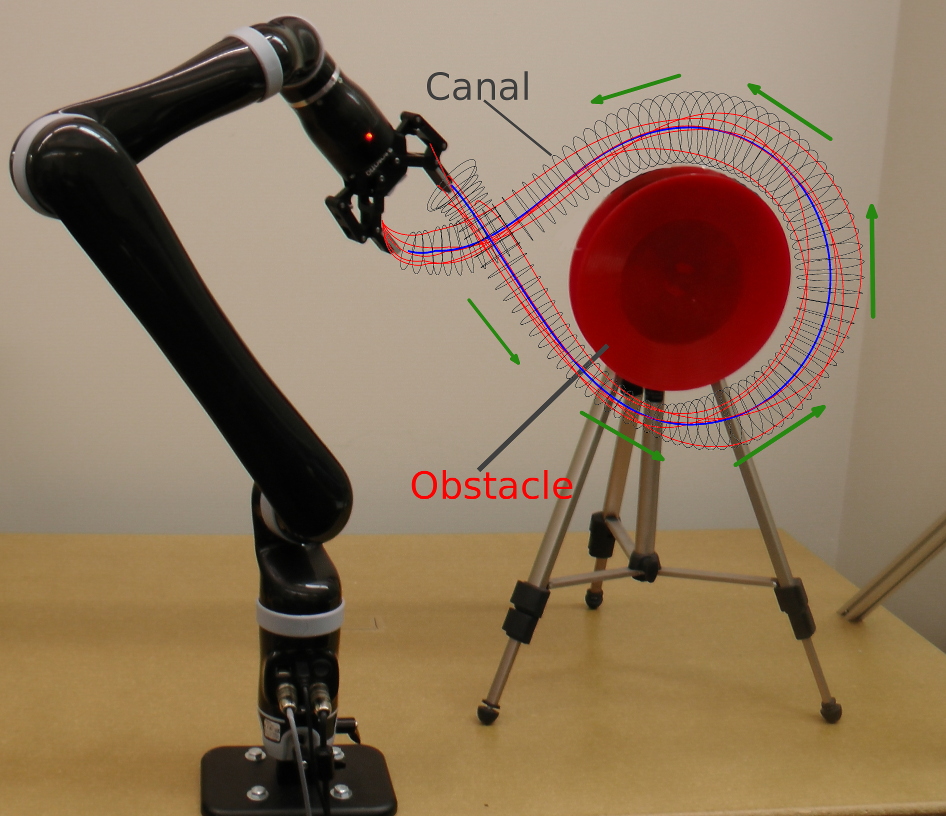
Trajectory Learning using Generalized Cylinders (TLGC)
A Learning from Demonstration approach for trajectory-based skill learning.
-
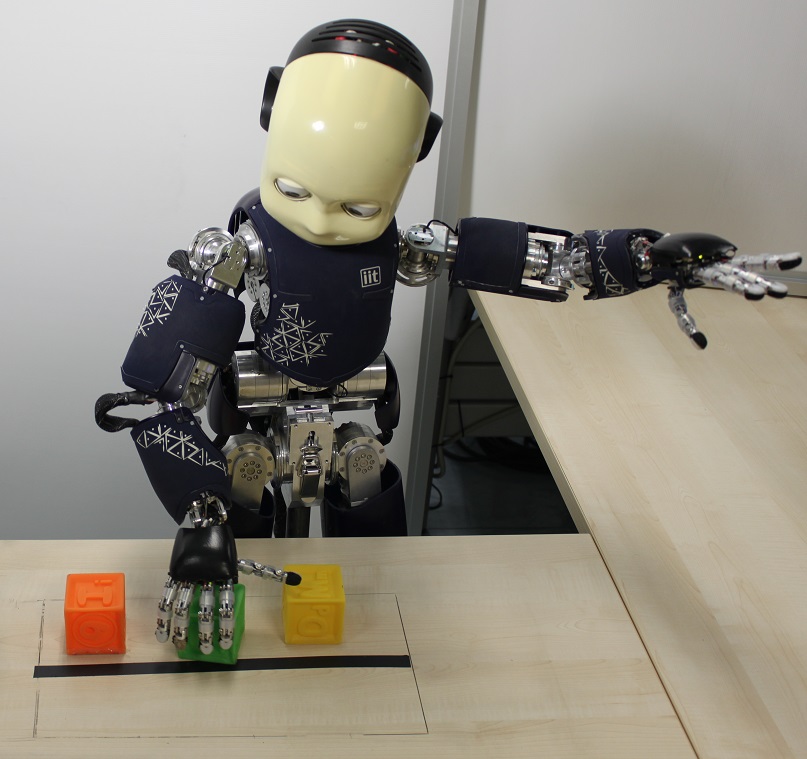
Visuospatial Skill Learning
A Learning from Demonstration approach for goal-based skill learning.
-
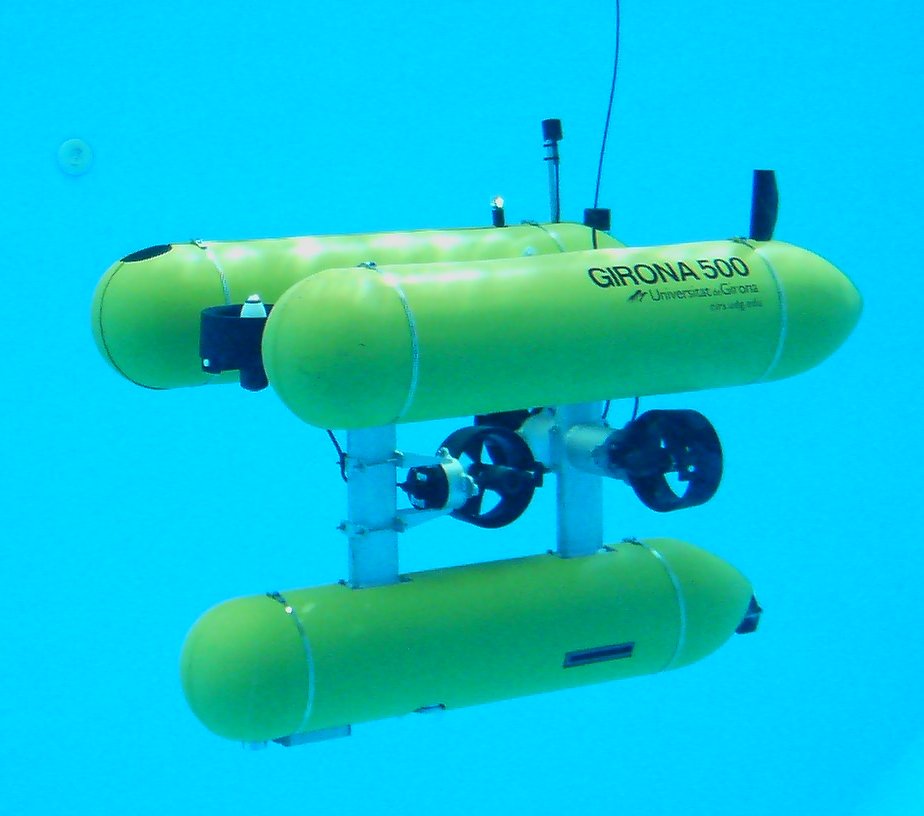
Failure Recovery for Autonomous Robots
A direct policy search for discovering new policies to overcome thruster failures in Autonomous Underwater Vehicles (AUVs)